Hiệu chuẩn máy đo độ rung – Vibration Meter Calibration tại Techmaster
Những rung động bất thường trong các máy móc, động cơ là những báo hiệu về sự hư hỏng. Bên cạnh đó, rung động của môi trường cũng ảnh hưởng đến hoạt động sản xuất và an toàn sức khỏe. Để kiểm tra rung động máy móc, công trình, nhà xưởng thì máy đo độ rung là công cụ đắc lực. Thiết bị này có thể đo lường các thông số: gia tốc, vận tốc, biên độ, tần số rung, … Từ các thông số đó, người dùng sẽ đánh giá chính xác tình trạng rung động để có biện pháp xử lý phù hợp.
Do đó, việc đảm bảo thiết bị này hoạt động ổn định và chính xác là vô cùng quan trọng. Vì thế máy đo độ rung cần được hiệu chuẩn định kỳ. Hãy cùng chúng tôi tìm hiểu về Quy trình hiệu chuẩn máy đo độ rung tại Techmaster.
1. Cấu tạo máy đo độ rung là gì ?
2. Các thông số độ rung
3. Ưu điểm của máy đo độ rung
Máy đo rung là phương tiện đo quan trọng để giám sát độ rung của các loại máy móc, động cơ, nhà xưởng, … Thiết bị này có những ưu điểm nhất định như sau:
– Đa số các loại máy đo rung có thiết kế nhỏ gọn, tính linh hoạt cao, dễ dàng vận chuyển đến các điểm cần kiểm tra.
– Hiển thị kết quả đo lường trong thời gian ngắn, nhanh chóng và có độ chuẩn xác cao
– Màn hình hiển thị kết quả rõ ràng và các thông số đo được chính xác như gia tốc, vận tốc, biên độ rung.
4. Ứng dụng của máy đo độ rung
Máy đo độ rung được sử dụng trong một loạt các ứng dụng khác nhau, trong nhiều lĩnh vực. Cụ thể như:
4.1 Kiểm tra tình trạng hoạt động của máy móc
Đối với các loại thiết bị truyền động, xoay tròn như motor, bạc đạn, trục truyền động, … việc kiểm tra rung động có ý nghĩa quan trọng. Những thiết bị này trong quá trình hoạt động lâu ngày thường gặp vấn đền lệch tâm, không đồng trục. Những vấn đề này nếu không được phát hiện sửa chữa kịp thời sẽ làm hư hỏng thiết bị, máy móc. Việc kiểm tra rung động bằng máy đo độ rung là vô cùng cần thiết, để đảm bảo máy móc luôn ổn định, tránh rủi ro hư hỏng. Ứng dụng này là ứng dụng cơ bản nhất của máy đo rung và thường sử dụng ở nhiều nhà máy, công xưởng, v.v.
4.2 Kiểm định chất lượng sản phẩm trước khi xuất xưởng
Có những thiết bị đặc thù khi xuất xưởng cần đảm bảo yếu tố chất lượng liên quan đến độ rung. Do đó, các thiết bị này cần phải sử dụng máy đo độ rung để kiểm định chất lượng sản phẩm đạt theo tiêu chuẩn cho phép. Trong đó, có các loại động cơ, motor, máy phát, v.v là một số sản phẩm cần kiểm tra độ rung trước khi xuất xưởng. Vì thế, trong các công đoạn này máy đo độ rung đóng một vai trò quan trọng.
4.3 Đo lường các yếu tố dân dụng và y tế
Ngoài các mục đích kiểm tra về máy móc như trên, máy đo độ rung còn ứng dụng cho các yếu tố đo lường dân dụng. Các yếu tố đó như kiểm tra độ rung sàn tòa nhà, cầu đường, y tế, … Đây là các yếu tố cần thiết để đánh giá chất lượng của tòa nhà, cầu đường, … Ngoài ra đối với lĩnh vực an toàn sức khỏe lao động, độ rung cũng là yếu tố quan trọng. Yếu tộ độ rung nếu mất kiểm soát về lâu dài gây ảnh hưởng đến sức khỏe con người. Do đó, cần phải có những tham số đo kiểm độ rung chính xác từ máy đo độ rung.
5. Quy trình hiệu chuẩn máy đo độ rung
5.1 Vì sao nên hiệu chuẩn máy đo độ rung ?
Máy đo độ rung là thiết bị quan trọng giúp đảm bảo chất lượng cho hoạt động sản xuất và chất lượng sản phẩm. Việc hiệu chuẩn giúp đánh giá chính xác tình trạng hoạt động của thiết bị. Do đó việc hiệu chuẩn thiết bị này vô cùng cần thiết. Công việc này giúp đảm bảo sự ổn định, chính xác cho các hoạt động liên quan. Qua hiệu chuẩn sẽ giúp phát hiện sớm các hỏng hóc của thiết bị (nếu có) để kịp thời khắc phục, sửa chữa.
5.2 Các phương tiện tham gia hiệu chuẩn máy đo độ rung
Các phương tiện tham gia hiệu chuẩn bao gồm:
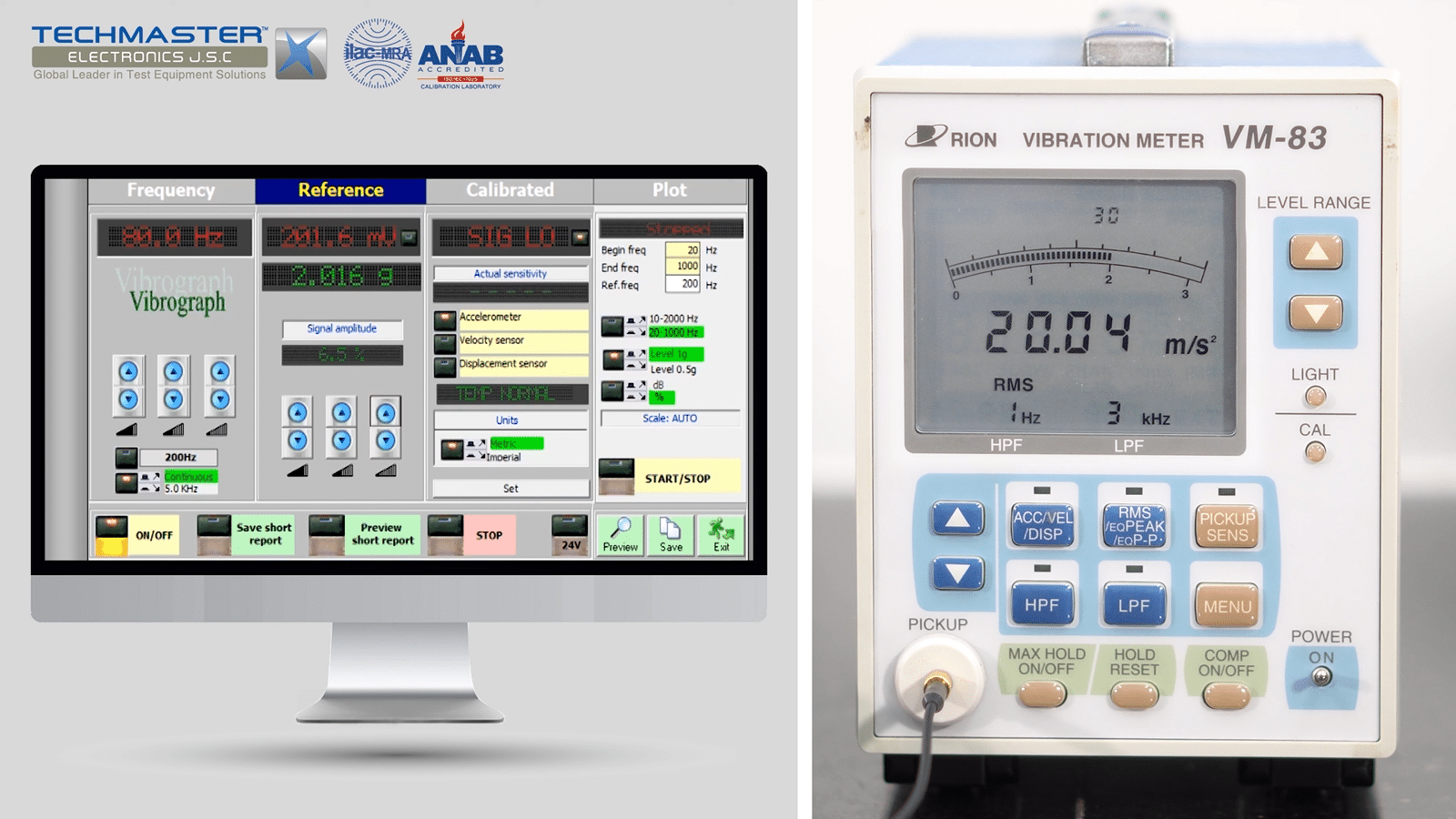
– Hệ thống hiệu chuẩn rung động: VMI International AB CA-200 kèm phần mềm, hoặc thiết bị tương đương.
– Bộ gá lắp cảm biến rung của phương tiên đo lên hệ thống chuẩn.
– Cảm biến rung tham chiếu
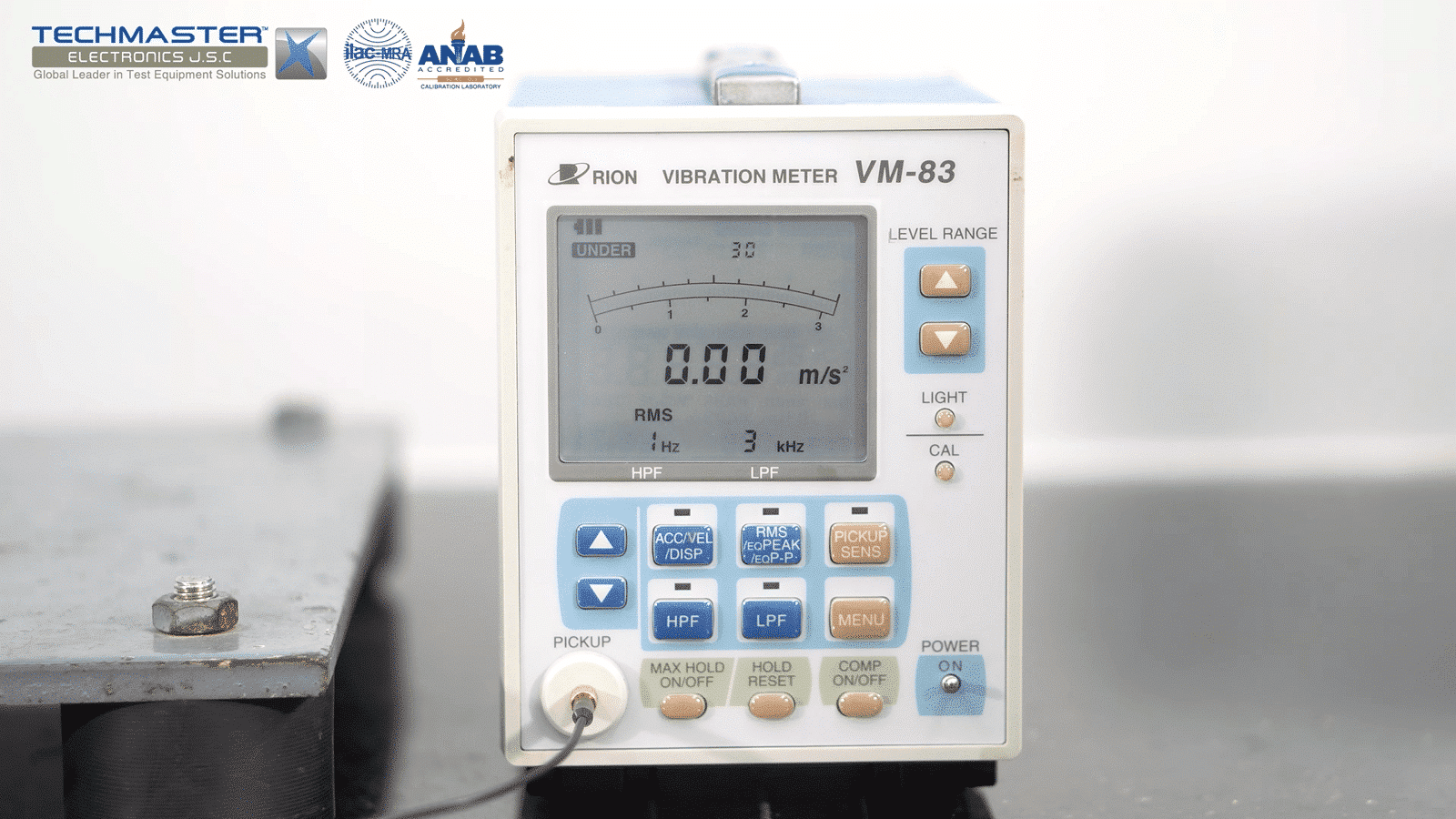
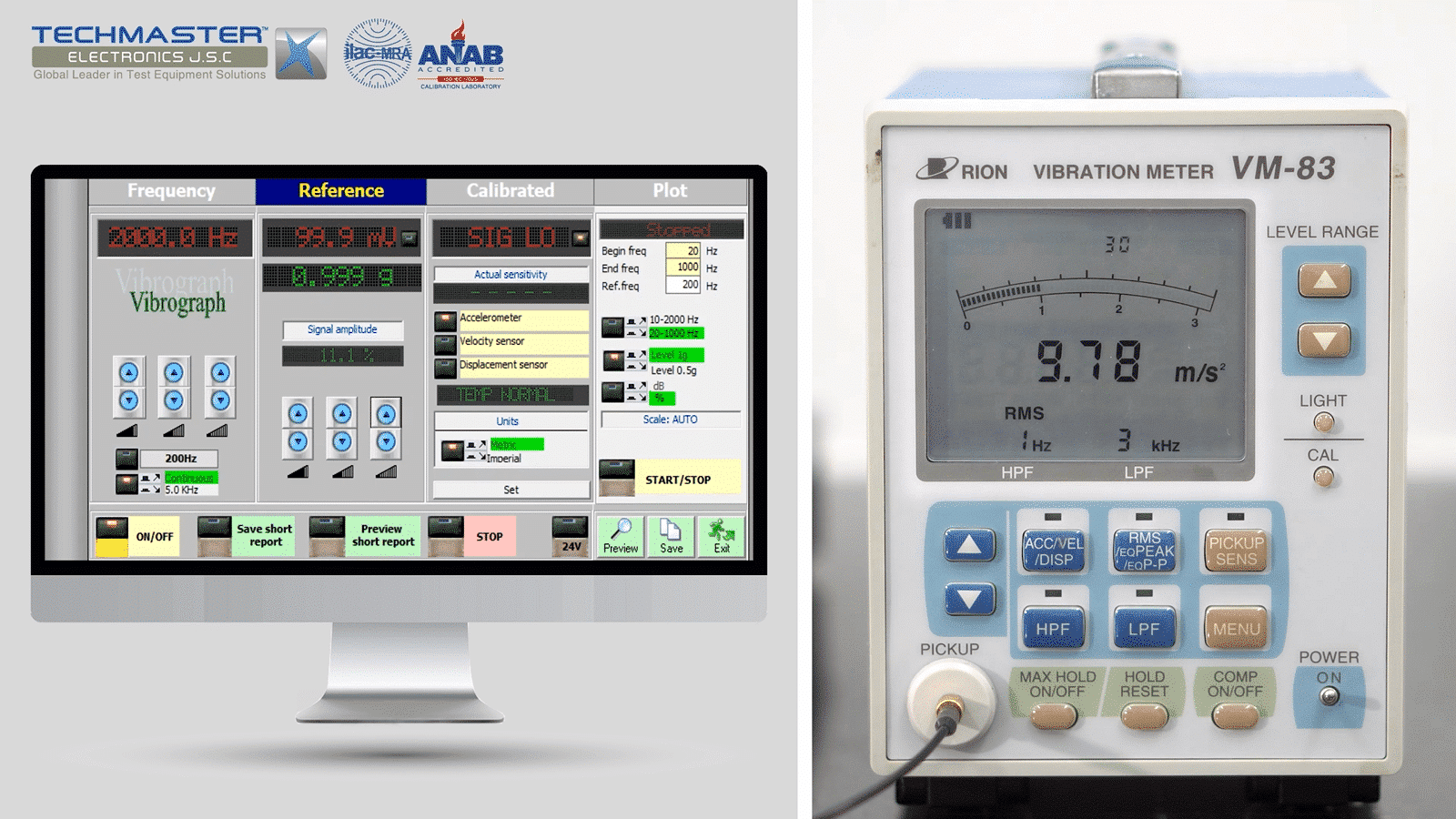
– Thiết bị cần kiểm (UUT): Máy đo rung Rion VM-83
5.3 Điều kiện môi trường hiệu chuẩn
Khi tiến hành hiệu chuẩn máy đo độ rung, cần đảm bảo tuân thủ chính xác các điều kiện sau:
– Nhiệt độ: 20~28ºC.
– Độ ẩm: 40~70%RH.
5.4 Chuẩn bị hiệu chuẩn
Quá trình chuẩn bị hiệu chuẩn sẽ diễn ra theo các bước sau:
– Vệ sinh bề mặt tiếp xúc giữa các cảm biến gia tốc và thiết bị tạo rung bằng khăn không bụi thấm cồn.
– Kiểm tra ngoại quan, lắp dây tín hiệu và cáp kết nối cho UUT và hệ thống hiệu chuẩn theo hướng dẫn của nhà sản xuất.
– Bật nguồn làm nóng thiết bị theo hướng dẫn của nhà sản xuất.
5.5 Tiến hành hiệu chuẩn máy đo độ rung
Tùy theo yêu cầu thực tế hoặc theo yêu cầu của khác hàng, lựa chọn một trong hai phương pháp hiệu chuẩn sau:
– Hiệu chuẩn gia tốc/ vận tốc/ biên độ rung
– Hiệu chuẩn độ nhạy theo tần số
5.5.1 Hiệu chuẩn gia tốc/vận tốc/ biên độ rung
Ở phương pháp hiệu chuẩn này, tiến hành thực hiện theo các bước sau:
– Lựa chọn mức tần số rung phù hợp theo yêu cầu khách hàng hoặc tài liệu nhà sản xuất.
– Nếu không có, chọn tần số rung cố định ở 80Hz.
– Kiểm tra điểm 0: ở trạng thái không chịu sự tác động của bất kỳ rung động nào, phương tiện đo phải hiển thị về 0 ứng với các chức năng đo gia tốc, tần số biên độ. Nếu khác 0 thì tiến hành cài về 0 hoặc ghi nhận độ lệch tại 0.
– Tiến hành hiệu chuẩn đo gia tốc ở các điểm 10,20,30 m/s2, biên độ ở các điểm 30,60,100 µm và vận tốc ở các điểm 20,60,100 mm/s hoặc theo yêu cầu khách hàng.
– Chọn chế độ đo gia tốc cho phương tiện đo và hệ rung chuẩn.
– Kích hoạt chức năng tạo rung, điều chỉnh gia tốc đến gần điểm cần kiểm.
– Đợi giá trị đo của phương tiện đo và hệ rung chuẩn được ổn định, ghi nhận giá trị đo được.
– Lặp lại thao tác đo 5 lần, ghi nhận kết quả trung bình và so sánh.
– Điều chỉnh gia tốc đến các điểm kiểm tra còn lại và ghi nhận tương tự.
– Công thức quy đổi giá trị đo:
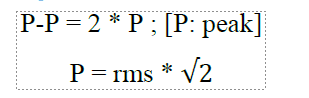
– Sau khi thực hiện xong chức năng đo gia tốc, thực hiện tương tự cho chức năng đo vận tốc, biên độ
5.5.2 Hiệu chuẩn độ nhạy theo tần số
– Tùy theo loại cảm biến rung, hệ số độ nhạy S có đơn vị mV/m/s2 (mV/g) hoặc pC/m/s2 (pC/g). Với g là gia tốc trọng trường tại nơi thực hiện, thông thường g = 9.8m/s2
– Cảm biến rung nếu có chức năng đo nhiều trục (x, y, z) thì tiến hành cho từng trục riêng lẻ.
– Lựa chọn thiết bị đọc phụ trợ phù hợp với tín hiệu đầu ra của cảm biến rung cần kiểm. Kết nối cảm biến cần kiểm với thiết bị phụ trợ này.
– Chọn tần số rung làm tham chiếu dựa theo thông số của nhà sản xuất, thông thường là 80Hz hoặc 160Hz, mức gia tốc rung được chọn là 10m/s2.
– Kích hoạt chức năng rung của hệ thống tạo rung, điều chỉnh sao cho đạt điểm gia tốc và tần số tham chiếu ở trên.
– Nếu thiết bị đo phụ trợ có thể điều chỉnh hệ số độ nhạy, thì tiến hành điều chỉnh sao cho độ lệch gia tốc giữa UUT với chuẩn nằm trong khoảng +/- 1%, và ghi nhận hệ số độ nhạy. Hệ số độ nhạy tính được:
![]()
– Thực hiện tương tự để xác định độ nhạy của cảm biến rung ứng với các tần số rung, gia tốc rung với ít nhất 6 mức tần số, 1 mức gia tốc như sau:
– Các mức tần số: 20Hz, 40Hz, 80Hz, 160Hz, 315Hz, 630Hz, 1kHz, 2kHz
– Các mức gia tốc: 10; 20; 50m/s2
– Ghi nhận giá trị độ nhạy tính được, ứng với tần số và gia tốc trên.
– Khi quá trình hiệu chuẩn hoàn tất, ngắt chế độ kích rung trên hệ thống chuẩn.
– Ngắt kết nối, tháo gỡ các cảm biến, dây tín hiệu… và bảo quản tất cả thiết bị.







